Artificial muscles could be employed in a host of applications, including miniaturized medical devices, robotics and smart textiles that respond to changes in their environment. Most such muscles created to date, however, are heavy and cumbersome while being relatively slow to actuate. Three research groups are now reporting on new fibre-based designs for artificial muscles that are lightweight and fast.
A team led by Polina Anikeeva of the Massachusetts Institute of Technology has used a drawing technique to create a two-faced polymer fibre that can be activated by heat and which can lift more than 650 times its own weight while withstanding strains of more than 1000% over thousands of use cycles. Bundles of the individual fibres can lift even heavier loads – just like their biological counterparts.
The researchers say they can produce the artificial muscle in large quantities – on the scale of hundreds of metres – with lateral dimensions ranging from microns to millimetres. This means that the technology could be used in applications ranging from the microscale (for example, in medical microrobots for surgery) to the macroscale (for example, lightweight prosthetic limbs).
Bilayer sandwich
The researchers made their fibres by first fabricating a preform, which is a macroscale model of a fibre that is then heated and stretched so that its length extends to hundreds of metres and cross-sectional features reduce by 10 to 10,000 times. They used a bilayer sandwich of two materials – cyclic olefin copolymer elastomer (COCE), which is a stretchable elastomer with a low thermal expansion coefficient, and polyethylene (PE), which is another standard, non-stretchable polymer with a higher thermal expansion coefficient.
“Once we have drawn our fibres, we can stretch them by up to 1000%,” explains Anikeeva. “During this process, the elastomer stretches but the other polymer plastically deforms permanently. Once we release the tension, the elastomer then attempts to contract, but the other polymer cannot – which results in the fibre curling into a spring. This is our fibre-based muscle.”
When the researchers apply heat to the material, the polyethylene tries to expand even further, but the low-thermal expansion elastomer does not expand as much. This produces a further tightening of the spring, which is the mechanism underlying actuation.
Lightweight and fast
Since they are made from polymers, the new artificial muscles are lightweight. They can also operate at modest temperature changes with a response time that is as short as tens of milliseconds, allowing for high-speed operation.
Anikeeva and colleagues also coated their fibre-based muscles with meshes of conductive metal nanowires, which when stretched or compressed change their resistance. They can thus be used for strain feedback, which means that they can measure the exact force, degree of deformation or the actuation temperature they experience.
The devices still require an externally applied heat stimulus for actuation though, which is obviously not ideal for engineering applications. “We are thus looking to integrate internal heating elements into our artificial muscles,” Anikeeva tells Physics World. “And since fibre-based fabrication is applicable to many materials with diverse properties, we could embed additional functionalities – such as optical features – into our devices.”
The possibilities for this type of artificial muscle are virtually limitless, says study lead author Mehmet Kanik, because any combination of two materials with different thermal expansion coefficients could work.
Sheath drives muscles
A second team, led by Ray Baughman of the University of Texas at Dallas, has designed another type of fibre made from polymer yarns that can generate 40 times more mechanical energy per second than can human muscle and nine times more than can the highest power alternative electrochemical muscles made to date.

Baughman and colleagues built on their previous work on guest-filled carbon nanotube (CNT) yarn muscles and polymer-fibre muscles, which, while showing remarkable performance, did suffer from a few problems. For one, the central region of the muscle contributed little to muscle contraction even though energy was applied to the entire structure.
“We have now overcome this drawback by driving the muscle using a sheath – which can be an inexpensive coiled yarn or fibre core,” explains Baughman. “The sheath on our new electrochemical muscle generates 1.98 kW/kg of average power during muscle contraction. When thermally driven, we can obtain a full-cycle average contractile power output of 9.0 kW/kg and 12 muscle contractions per second for a muscle with a polymer sheath and a coiled CNT yarn core. To compare, human muscle has a contractile power of just 50 W/kg.”
The researchers employed several different polymers as the sheath materials. For example PEO-SO3 which is a blend of poly(ethylene oxide) and a copolymer of tetrafluoroethylene and sulphonyl fluoride vinyl ether, responds to ethanol vapour. Polyurethane responds to heat, and carbon nanotube (CNT) sheaths swell in response to electrochemical charges.
Inner core provides stiffness
The inner core of the structure provides muscle strength and stiffness and directs the twisting motion of the fibre. “In the simplest structure, which can be used in smart textiles, we make our sheath-run artificial muscles (SRAMs) using a commercially available low-cost twisted yarn (nylon, for example) as the core and a commercially available polymer as the sheath,” Baughman tells Physics World. “We dissolve the sheath polymer in a solvent that will not infiltrate into the core, coat it on the core polymer to the appropriate thickness (the size of which is important for performance). We then add sufficient twist to introduce coiling into the sheath-coated yarn while the sheath polymer is in a deformable state.”
Making the electrochemical sheath-run muscle is slightly more complicated, he says. Here, the researchers twist a cylindrically configured carbon nanotube sheet stack around a core fibre (which is a nylon yarn in the present work) until the yarn fully coils.
Host of applications
These SRAMs could find use in a host of applications. These include microscale actuators that intelligently control flow in fluidic circuits and macroscale arrays of actuators for humanoid robots and exoskeletons. Sheath-run muscles that harvest chemical or thermal energy as mechanical energy, which is then converted to electrical energy, is also an interesting possibility for powering remotely-communicating sensors, for example, and harvesting electrical energy from industrial waste streams.
“They might also be used in textiles that respond to temperature and moisture (like sweat) by changing their porosity,” adds Baughman. “We are also investigating this ability to respond intelligently to the environment for smart drug delivery systems that would detect the presence of antigens, for example, and react by contracting to release the appropriate drug.” The researchers say they have already obtained promising early stage results for such devices.
Untethered high-energy micro-engine
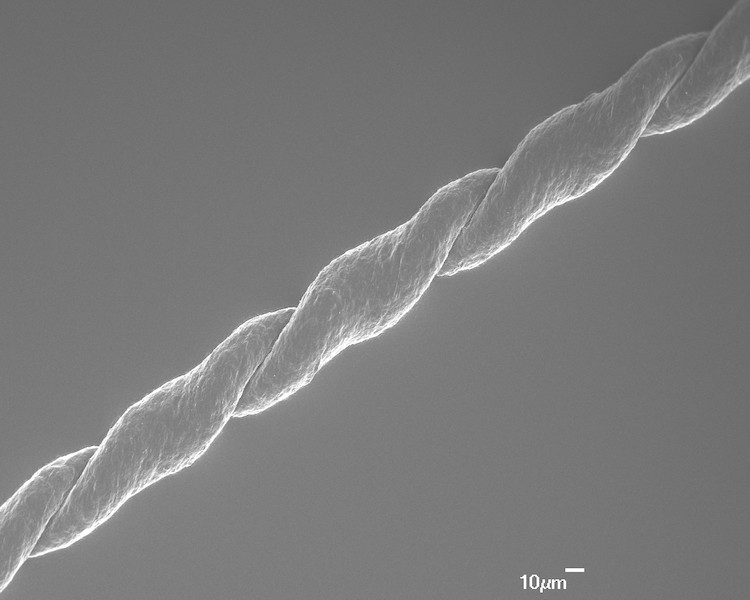
A third research team, led by Jinkai Yuan and Philippe Poulin at the University of Bordeaux in France has made an untethered high-energy micro-engine composed of shape memory nanocomposite fibres. These fibres are twisted to store mechanical energy that can then be released on demand by applying a small temperature change.
“Untethered control is a big challenge for today’s robotics, particularly for implants and undersea vehicles,” says Yuan. “Our concept provides a new route toward untethered actuation, control and propulsion in robotics.”
The researchers made their twisted shape memory nanocomposite fibres from the shape-memory polymer polyvinyl alcohol (PVA) as a matrix filled with dispersed graphene oxide platelets. The graphene oxide nanosheets play an important role in improving the torsional properties of the fibre thanks to their unique rigid 2D structure. This allows the fibre to store more mechanical energy within the fibre before it fractures.
Untwisting releases mechanical energy
The PVA can be programmed to adopt a certain shape – such as a highly twisted conformation as in this case – at high temperature. It is then thermally quenched to fix the twisted shape. In this work, the researchers introduced twist into the fibre at thousands of turns per metre of fibre length, with a rotation speed of several tens of revolutions per minute (rpm). When heated to just above the programming temperature, the mechanical energy stored by the twisted fibre is quickly released as it recovers its straight shape by untwisting.
The coiled structure can retain its shape without being tethered because of the glassy non-equilibrium conformation of the helically-configured polymer chains, Yuan tells Physics World.
“The other good thing about the twisted shape memory nanocomposite fibres is that they have a distinctive temperature memory feature that allows us to tune the operation temperature over a large range and release the stored energy in a stepwise fashion,” he adds. “This means that they show a maximum recovery torque and rotation speed at a well-defined temperature – that at which they were previously deformed.”

Hydrogel material flexes its muscles
Record work density
The shape-memory nanocomposite fibres are able to deliver a record work density of around 2.8 kJ/kg and can operate for at least 10 cycles before failing. They could also potentially be coupled to elastic yarn-like cores to provide a torque that allows them to repeatedly actuate like an artificial muscle.
“Our devices based on shape-memory fibres can fit in small spaces and reliably rotate with high speed,” says Yuan. “This means they could be used in micro-robotics, laboratories-on-a-chip, smart textiles and miniaturized medical devices, to name but a few examples.”
The Bordeaux team says that it is now trying to introduce reverse actuation into its fibres.
All three groups report their work in Science. Full details of Anikeeva’s team research is here, Baughman and colleagues’ here and Yuan and Poulin’s here.