Researchers at the Brain Center Rudolf Magnus in the Netherlands have used population receptive field (pRF) modelling to confirm the ordered representation of human fingers in the motor cortex. While a topographic map (smooth transitions from the thumb to the little finger) of the fingers in the somatosensory cortex is well established, it was unknown whether this pattern was evident in neighbouring motor regions.
The team used computational pRF modelling to analyse functional MRI (fMRI) data of participants flexing and extending their fingers during a scan. In addition to finding finger organization, the group found a degree of interconnectedness between somatosensory and motor cortices, and showed differences in the neural population receptive field size across fingers (NeuroImage 10.1016/j.neuroimage.2018.06.062).
During a scan, the participant flexed each finger in turn (thumb to little finger, or vice versa) holding each position until all fingers were flexed. Then, each finger was extended in turn. The order and timings were cued by a visual stimulus; the subjects also wore an MR-compatible glove that tracked flexion, for quality control.
What is a pRF?
The receptive field (RF) of a single neuron is the region in sensory space to which that neuron responds most strongly/selectively. Since fMRI defines a volume element (voxel) in an image, each voxel therefore represents the sum of many neurons, i.e., a population receptive field.
Since the researchers knew the order and timings of flexion/extension, they could create a predicted model of the stimulation during the scan. This model is a voxel-wise time-series, which tracks the blood oxygenation level dependent (BOLD) response across a cortical region-of-interest (in this case, motor and somatosensory areas).
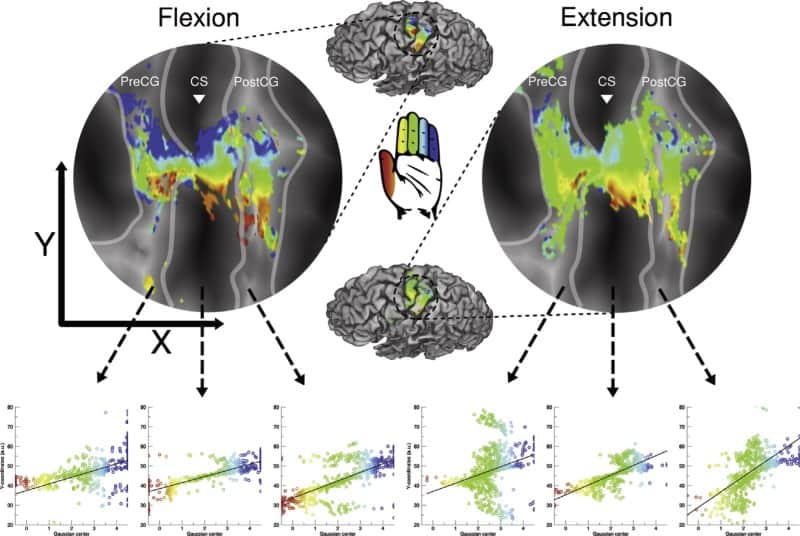
For every voxel in the brain region, the researchers compared the predicted model time-series with the actual BOLD data acquired in the experiment, using a non-linear least squares minimization algorithm to minimize the errors between predicted and real time-series. This gave a set of stimulus-relevant parameters – in this work, an explicit Gaussian model that possess a centre and a spread. For every voxel, the centre shows which finger moved, while a larger spread indicates that the voxel responds more to other fingers than its own preferred one.
The pRF method is a highly robust way of mapping topographic patterns in the brain, since it takes receptive field properties (such as pRF size and broad neural tunings) into account, explaining the fMRI signal to a larger extent. It is therefore better equipped to distinguish true signal from noise.
Flexion or extension?
The group found that ordered individual finger representations crossed both motor and somatosensory areas. They suggest that an interdependence of motor and somatosensory development explains the concurrent maps running across both regions. Overall, it seems that some neuronal populations in both sensory and motor areas respond to multiple fingers.
Smaller pRFs were found for the thumb and larger pRFs for the little finger, but this pattern wasn’t always perfectly linear. Finger organization was less clear with finger extension compared with finger flexion, and pRF size was larger for extension. This could be because letting go of something (extension) doesn’t require the same level of specificity as gripping something (flexion) in day-to-day usage.
The larger pRFs for the little finger and finger extension could imply that these neural populations are relatively unspecific (to the finger or to the motion).
One note of caution is that the pRF size estimate (spread of the Gaussian model) can be influenced by non-neural factors. For example, it also depends on the order of stimulation, which defines which finger moves first; or finger enslavement, where the ring and little fingers are difficult to move independently.
This work provides an interesting first look at applying pRF mapping to brain regions other than visual cortex. There are several challenges regarding the development of this method for somatosensory and motor domains, such as experimental design and pRF model choice, among others. This research is an exciting first glimpse of the rich information that can be revealed by this flexible method.