Artificial muscles that offer flexible functionality could prove invaluable for a range of applications, from soft robotics and wearables to biomedical instrumentation and minimally invasive surgery. Current designs, however, are limited by complex actuation mechanisms and challenges in miniaturization. Aiming to overcome these obstacles, a research team headed up at the Acoustic Robotics Systems Lab (ETH Zürich) in Switzerland is using microbubbles to create soft, programmable artificial muscles that can be wirelessly controlled via targeted ultrasound activation.
Gas-filled microbubbles can concentrate acoustic energy, providing a means to initiate movement with rapid response times and high spatial accuracy. In this study, reported in Nature, team leader Daniel Ahmed and colleagues built a synthetic muscle from a thin flexible membrane containing arrays of more than 10,000 microbubbles. When acoustically activated, the microbubbles generate thrust and cause the membrane to deform. And as different sized microbubbles resonate at different ultrasound frequencies, the arrays can be designed to provide programmable motion.
“Ultrasound is safe, non-invasive, can penetrate deep into the body and can generate large forces. However, without microbubbles, a much higher force is needed to deform the muscle, and selective activation is difficult,” Ahmed explains. “To overcome this limitation, we use microbubbles, which amplify force generation at specific sites and act as resonant systems. As a result, we can activate the artificial muscle at safe ultrasound power levels and generate complex motion.”
The team created the artificial muscles from a thin silicone membrane patterned with an array of cylindrical microcavities with the dimensions of the desired microbubbles. Submerging this membrane in a water-filled acoustic chamber trapped tens of thousands of gas bubbles within the cavities (one per cavity). The final device contains around 3000 microbubbles per mm2 and weighs just 0.047 mg/mm2.
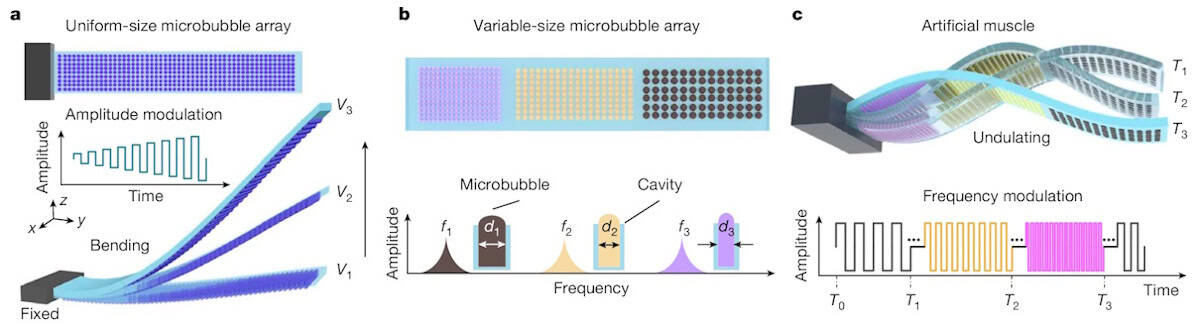
To demonstrate acoustic activation, the researchers fabricated an artificial muscle containing uniform-sized microbubbles on one surface. They fixed one end of the muscle and exposed it to resonant frequency ultrasound, simultaneously exciting the entire microbubble array. The resulting oscillations generated acoustic streaming and radiation forces, causing the muscle to flex upward, with an amplitude dependent upon the ultrasound excitation voltage.
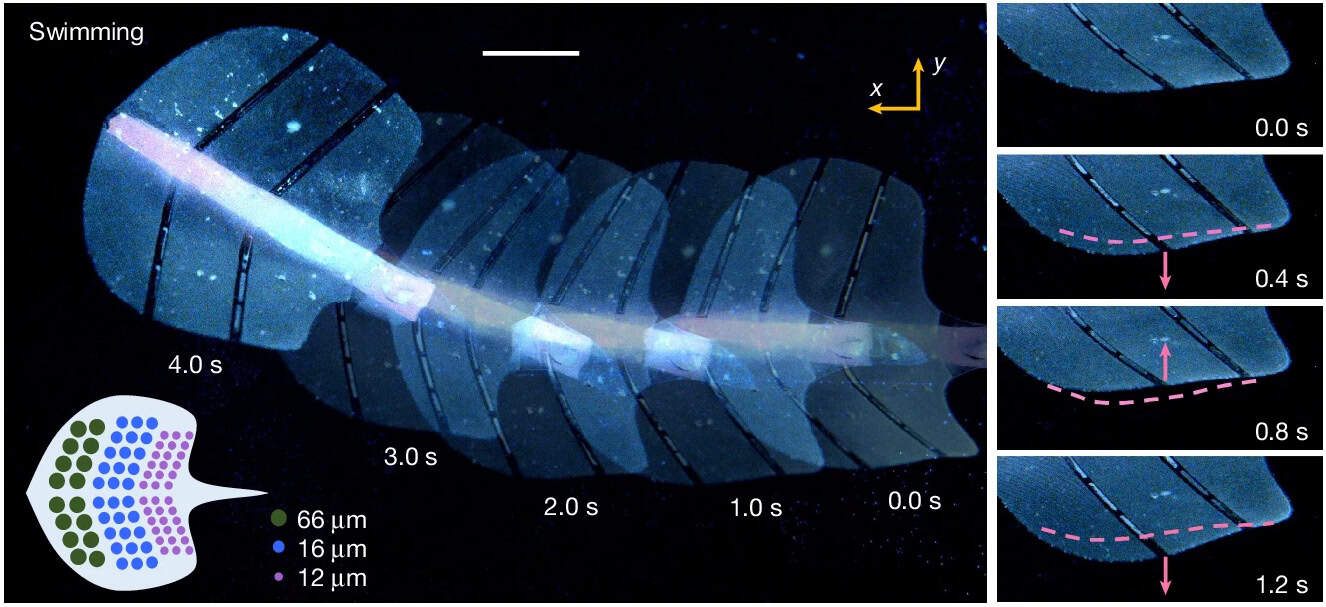
Next, the team designed an 80 µm-thick, 3 x 0.5 cm artificial muscle containing arrays of three different sized microbubbles. Stimulation at 96.5, 82.3 and 33.2 kHz induced deformations in regions containing bubbles with diameters of 12, 16 and 66 µm, respectively. Exposure to swept-frequency ultrasound covering the three resonant frequencies sequentially activated the different arrays, resulting in an undulatory motion.
A multitude of functions
Ahmed and colleagues showcased a range of applications for the artificial muscle by integrating microbubble arrays into functional devices, such as a miniature soft gripper for trapping and manipulating fragile live animals. The gripper comprises six to ten microbubble array-based “tentacles” that, when subjected to ultrasound, gently gripped a zebrafish larva with sub-100 ms response time. When the ultrasound was switched off, the tentacles opened and the larva swam away with no adverse effects.
The artificial muscle can function as a conformable robotic skin that sticks and imparts motion to a stationary object, which the team demonstrated by attaching it to the surface of an excised pig heart. It can also be employed for targeted drug delivery – shown by the use of a microbubble-array robotic patch for ultrasound-enhanced delivery of dye into an agar block.
The researchers also built an ultrasound-powered “stingraybot”, a soft surgical robot with artificial muscles (arrays of differently sized microbubbles) on either side to mimic the pectoral fins of a stingray. Exposure to swept-frequency ultrasound induced an undulatory motion that wirelessly propelled the 4 cm-long robot forward at a speed of about 0.8 body lengths per second.
To demonstrate future practical biomedical applications, such as supporting minimally invasive surgery or site-specific drug release within the gastrointestinal tract, the researchers encapsulated a rolled up stingraybot within a 27 x 12 mm edible capsule. Once released into the stomach, the robot could be propelled on demand under ultrasound actuation. They also pre-folded a linear artificial muscle into a wheel shape and showed that swept ultrasound frequencies could propel it along the complex mucosal surfaces of the stomach and intestine.
Could bubble-like microrobots be the drug delivery vehicles of the future?
“Through the strategic use of microbubble configurations and voltage and frequency as ultrasound excitation parameters, we engineered a diverse range of preprogrammed movements and demonstrated their applicability across various robotic platforms,” the researchers write. “Looking ahead, these artificial muscles hold transformative potential across cutting-edge fields such as soft robotics, haptic medical devices and minimally invasive surgery.”
Ahmed says that the team is currently developing soft patches that can conform to biological surfaces for drug delivery inside the bladder. “We are also designing soft, flexible robots that can wrap around a tumour and release drugs directly at the target site,” he tells Physics World. “Basically, we’re creating mobile conformable drug-delivery patches.”