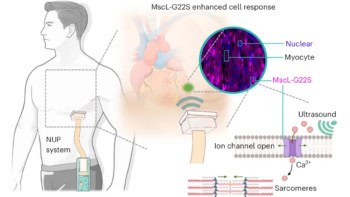
Researchers at the University of Pittsburgh have measured neural firing in the motor cortices of two tetraplegic subjects using intracortical electrodes (electrodes implanted directly into the brain). The subjects used a brain-computer interface (BCI) to control a neuro-prosthetic robotic arm and attempted to reach and grasp an object in space. The presence of the object altered the subjects’ cortical activity and adversely affected BCI performance, since calibration and decoding were performed prior to the task.
In this study, the group added a simple online scaling factor to their BCI model, improving subjects’ control of the robotic arm. Their research provides a generalizable BCI control method and explores neural changes in the motor cortex, furthering the development of human and machine interaction (Scientific Reports 7 16947).
The development of BCIs to control prosthetic appendages is extremely important. For example, the use of robotic exo-skeletons enables heavy lifting in industry; while in healthcare, BCIs could provide a way for patients who have lost the use of their limb(s) to regain control and independence. Linking robotic arms to the user’s brain is an ongoing field of research, but it is hindered by difficulties in understanding how the brain operates during a motor task at the neural population level.
In this work, the researchers quantified the differences in neural firing during robotic grasping with and without an object, and improved subjects’ performance in the task by correcting for these neural changes online.
Training and scaling
The researchers implanted intracortical microelectrode arrays that can record from neural populations into each subject’s motor cortex (M1). Prior to the task, they used virtual reality to train the BCI decoder, such that it could correctly interpret the neural activity from the subject, and communicate with the neuro-prosthesis. The subjects performed a calibration reaching task in virtual reality to train the decoder.
Two subjects then performed three tasks in a real environment: reaching and grasping a cylindrical object; reaching to same position and closing the hand in the absence of an object; and an object transport task, whereby they had to pick up the object, move it across a 20 cm zone and place it on the other side, as many times as possible.
The team calculated a scaling factor to correct for changes in motor cortical activity during the task, equivalent to the mean neural firing rate over the previous 300 ms of recording divided by the neural firing rate during calibration.
Online correction improves BCI performance
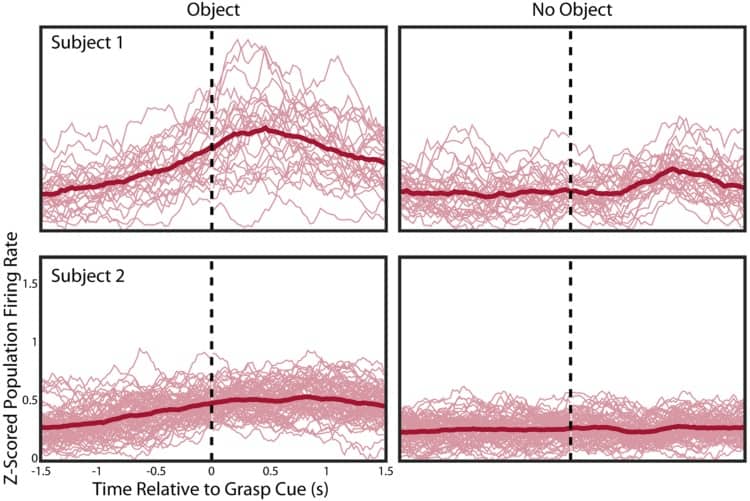
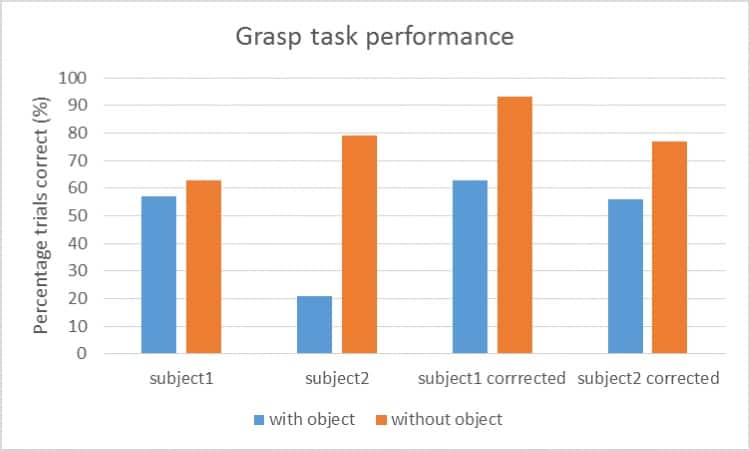
The presence of an object during the grasping task decreased BCI control, leading to poorer subject performance. This was caused by a steady increase in population firing rate in the motor cortex, as measured using the intracortical electrodes, as the robotic arm moved closer to the object.
The researchers then used their scaling factor to correct for this performance drop, by dividing each channel of the microelectrode array by the scaling factor. This quick, online correction improved both subjects’ performance. They both also showed significant improvement in the object transport task after the correction.
Implications
It is unknown why neural firing increases in M1 when grasping an object – it may be that object information, planning and execution is encoded in nearby brain regions. However, the interaction of objects and motor control has not been studied in depth. The authors also suggest that the use of a prosthetic arm may have affected the neural firing – this could be compared to natural arm movement to see if there is similar sensitivity.
In this study, the researchers provide a generalizable online adjustment to improve BCI control, and pave the way for exploring mechanisms relating to motor cortex/object interaction.