A soft and sensitive electronic skin containing an array of capacitors that can measure the direction of applied pressure in real time might be used as the artificial skin of domestic robots in the future. It might also be useful for robot-assisted surgery and in industry – for handling eggs and fruit, for example, on a production line. The new e-skin was made by researchers at Stanford University in the US who based it on a 3D hierarchical structure that mimics the interlocked dermis-epidermis interface in human skin.
“Manufacturing robots have been around for more than half a century and surgical robots are currently revolutionizing health care, but domestic robots are still not part of our everyday lives,” says team member Marc Negre, who is in the Department of Chemical Engineering at Stanford. “One of the reasons for this is because these robots lack the equivalent of human skin, and in particular dexterity and “in-hand manipulation” (tactile sensing on palm and fingertips). Such sensing is required for manipulating objects.”
Sensor can measure both normal and shear forces
“We have now designed a sensor that can measure both normal and shear forces in real time with great sensitivity. Once integrated on the fingertips of a robot, for instance, this pressure direction sensing capability is key for dexterous tasks like handling delicate objects.”
The new e-skin mimics the spinosum in human skin. This microstructure, which is composed of interlocked hills and localized at the interface between the epidermis and the dermis, produces localized stress at the wrinkle tips near mechanoreceptors when it senses external mechanical pressure. There are four types of receptors: two slow-adapting receptors that respond to low-frequency static pressures and two fast-adapting ones that respond to high-frequency dynamic forces and vibrations.
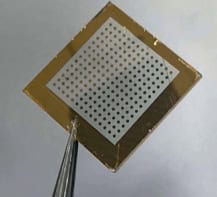
“Our e-skin mimics the hills and mechanoreceptors present in the spinosum to detect normal and shear forces,” says Negre. “It is composed of two electronically flexible layers (formed by carbon nanotube top and bottom electrodes embedded into a polyurethane matrix) separated by an insulating dielectric layer to create a capacitance effect. Each hill corresponds to 25 capacitors, each 90,000 μm2 in size (one capacitor on the top of the hill, four on its slopes, four in the corners and 16 surrounding the hill).
3D hill structure is key
“This 3D hill structure and the way the top layer anisotropically deforms with applied tilt force is key to obtaining information about the pressure direction,” explains Negre. “The capacitors located on the side of the hill, and exposed to a greater pressure, show a larger increase in capacitance than those located on the side opposite to the applied force direction. We can thus map the direction of this pressure.”
The e-skin is highly sensitive (comparable to state-of-the-art levels reported in the literature) and is able to detect pressure direction over time scales of milliseconds, he tells Physics World.
The researchers, led by Zhenan Bao, tested out their e-skin by attaching it to the fingers of a glove worn by an artificial hand, itself mounted on a robot arm, to show that it can be integrated, in principle, in a real-world robotic application. The experiment includes placing a round, light object (a ping-pong ball) between two fingers of the robot hand that then grasp and transfer the ball to and from different holes without squashing or dropping it. The robot fingers can also lightly touch a fresh raspberry without crushing it.
“Our e-skin could find use in a variety of applications, such as robot-assisted surgery where very accurate touch control is necessary,” says Negre. “It might also be used to handle delicate objects like eggs and soft fruit on a production line.”
Bao and colleagues, reporting their work in Science Robotics 10.1126/scirobotics.aau6914, say that they ultimately hope “to create control systems to enable a robot to perceive the characteristics of objects and autonomously calculate how much force to apply.”