Think advanced robotics and you might still be thinking of shiny metal versions of ourselves, something like the Star Wars droid C-3PO or Transformers’ Optimus Prime. However, a lot of tasks that would benefit from automation require a softer touch. Now researchers at Harvard University and the Wyss Institute for Biologically Inspired Engineering in the US have taken efforts towards soft robotics a step further by demonstrating a robotic system where not only the machine body is soft but the digital logic system to control it is soft too.
“Soft robotics – a field in which compliant rubbers and foams replace the metal gears and grippers of traditional robotics – has only recently begun to receive widespread attention for its ability to allow handling of delicate objects, and to enable safe collaboration with human users,” says Harvard postdoctoral researcher Daniel Preston, who worked alongside Harvard University Professor George Whitesides, on the project and is the lead author of the paper reporting these results. However as Preston tells Physics World these “soft” robots are still mainly controlled by electronic computers and hard solenoid valves, limiting their use in certain medical applications, and also in harsh environments like nuclear disaster sites. “We drew on concepts from microfluidics, and ultimately from electronics, to develop a completely soft, pneumatic digital logic system that, when integrated into soft robots, allows memory of past events and simple decision-making abilities.”
Kinky data processing
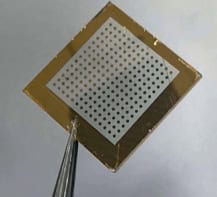
The basic pneumatic structure involves two cavities separated by a hemispherical membrane that acts as a bistable valve. A rubber tube in each cavity traces out a square tooth path that squashes into acute kinks on one side where the convex surface of the membrane protrudes into the cavity space, and fills out to a U-bend shape on the other side where the concave surface leaves more room.
2D sheets help make liquid logic
The kinks block the pathway in the tube so that only the pressure in the tube on the concave side will connect to the output pressure where the tubes join. Adding input pressures into the cavities can then cause the hemispherical membrane to either “snap-thru” or “snap-back” at minimum and maximum threshold pressures to swap which tube is kinked and which connects through to the output pressure. Different configurations of the device will then give output pressures that depend on the input pressures to render basic NOT, AND and OR data logic gates.
The researchers liken the functionality of their membrane-tube system to a “Schmitt trigger”, a hysteretic circuit used in electronics for analog-to-digital conversion, level detection, and line reception. Using various combinations of their gates they show how they can render various information processing and memory functions including a set-reset latch, shift register, leading-edge detector and a digital-to-analog convertor.
The strengths of soft control
By modifying the soft bistable valve into a button they were then able to deploy their soft logic in a completely soft human-operated gadget for gripping objects. They also connected a pressure sensor and showed that the device would respond to changes in environmental pressure, such as the pressure increases deep under water.
“We envision that this new technology will be used in therapeutic and rehabilitation applications, where completely soft medical devices can reduce further injury or irritation,” Preston tells Physics World. “For example, using integrated soft digital logic, completely soft medical devices can respond to stimuli from a patient, like pressing a soft button to turn a device on or off, or to environmental stimuli, like pressure-points that may cause bed sores on a patient’s body.”
Full details are reported in the Proceedings of the National Academy of Sciences.