Self-folding materials that can snap shut and grip objects have been created by researchers in Switzerland and the US. Inspired by origami and the folding wings of the earwig, the materials were made with a 3D printer and the team’s design principles could potentially have broad applications in, for example, robotics and even winged drones.
Origami is the ancient Japanese art of paper folding. As well as being aesthetically beautiful, it is mathematically fascinating and has important applications in engineering and technology. The conventional mathematical model of origami treats surfaces as completely rigid plates connected by flexible hinges. The assumption is that there is no resistance to a fold in which all the motion is perpendicular to the hinge. However, any other fold – for example one which stretches the hinge – is not described by the model.
Despite its mathematical elegance, the conventional model of origami has two weaknesses. First, it fails to capture the full set of possible folding patterns that can be made with real materials, which are not perfectly rigid. Secondly, by making motion either resistance-free or impossible, it cannot model bistable systems that resist deformation before snapping into a different shape configuration.
Tightly folded
Bistable systems exist in nature and include earwig wings – which can snap rapidly between a tightly folded crawling state and an open configuration for flying. The wings are stiff enough in the unfolded state to support aerodynamic loads during flight, but that stiffness does not prevent the wings from remaining tightly folded when not in use.
Researchers have already modified classical origami models by adding bending resistance to the creases, but this does not reproduce bistable behaviour. Now, Jakob Faber and André Studart of ETH Zürich in Switzerland and Andres Arrieta of Purdue University in the US have worked out that the earwig wings are able to snap tightly shut because the creases are able to stretch during the folding process.
A folding challenge

Armed with this knowledge, the team created a new origami model that includes finite resistance of a crease to stretching – as well as a finite resistance to bending. With these two types of resistance, deformation becomes “a competition between stretching and bending,” explains Arrieta , allowing bistable structures with two potential-energy minima. When a structure in either state experiences small forces, like the aerodynamic forces on the earwig’s unfolded wing, the resulting crease stretching increases its strain energy. When the forces are removed, the structure returns to its original state.
When the strain energy is increased beyond a certain threshold, however, the energy required to stretch a crease any further becomes lower than the energy required to overcome the bending resistance. The structure can therefore most effectively minimize its strain energy by folding up into a different shape, much as the earwig’s wing snaps shut when required. Once the structure reaches this new potential energy minimum, the stretch resistance of the crease will prevent it from returning to the original state until it is deformed beyond the required threshold.
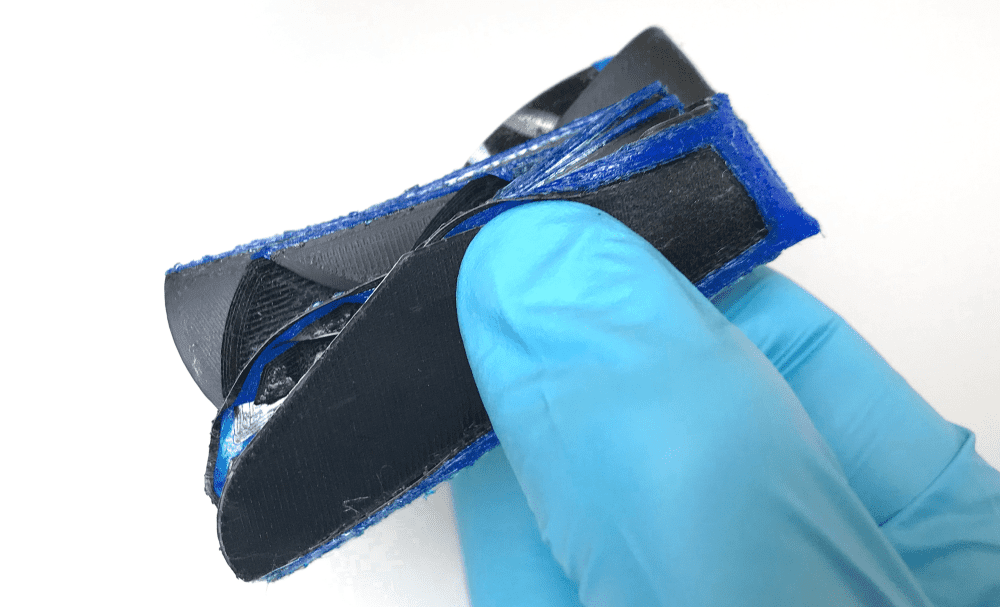
The researchers used 4D printing (3D printing of objects that can evolve with time) to deposit sheets of a rigid polymer polylactic acid connected by an elastomer in carefully predetermined patterns. As well as producing artificial wings (see figures), they also made a gripper device that can snap shut and hold-on to an object without external actuation. Using their model, the team could predict, and experimentally control, the threshold strain required to open and close the gripper by tuning the ratio of the stretching and bending stiffness of the creases. Once actuated, the gripper could lift objects equal to its own weight without further energy input.
Adding a topological fold to origami metamaterials

“What’s very interesting for us now is to play with the design of the materials that we would use on the creases,” says Arrieta . “Because then one can combine things like phase transformation and other viscoelastic effects with this purely elastic energy storage to create some interesting behaviour.”
Jesse Silverberg of Harvard University is impressed by the work: “The modelling and the math that they went into was fairly normal for the field,” he says, “The real strength of the [work] was that they actually made a device.” He cautions, however, that the field still needs to explore the durability of these strain-storing structures when cycled repeatedly: “If we’re going to think about a next generation version of drones, for example, in which we have deployable wings instead of helicopter propellers, we need to think about what the real-world limitations are going to be for this set of design principles. As a field we haven’t really gotten to these questions yet because we’re still showing what the possibilities are.”
The research is described in Science.