The ability to make decisions distinguishes robots from basic machines. Most robots are wired with electronic circuits for decision making, a convention that has developed into a sophisticated art capable of fast data-dense operations. However as robotics broaches applications such as surgery and disaster response, the demands for soft robots increase, raising compatibility issues with the hard world of silicon electronics. By demonstrating binary logic operations using origami, researchers at the Wright-Patterson Air Force Base in the US demonstrate a type of mechanologic that may provide a useful complement to electronics.

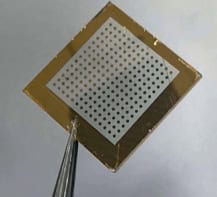
Benjamin Treml, Andrew Gillman, Philip Buskohl, and Richard Vaia investigated the possible logic operations of a waterbomb-base origami pattern, where inward and outward pointing configurations can indicate 0 and 1 states in binary logic. In general origami systems have localized folding with flat planes that can accommodate hard electronics to complement the mechanologic. However, the water bomb structure in particular has additional advantages as the apex can point inwards or outwards without affecting the mount or valley nature of surrounding folds. “We believe these properties allow the mechanical bit to switch between 1 and 0 states without interfering with the ability of other connected units to reconfigure in the multiunit structures presented below,” they explain in their paper.
Sensing-decision-response structures
As well as decision making, the robot must be able to sense inputs and respond with outputs. While there are a number of materials with physical responses to environmental stimuli, Treml et al. investigate water bomb structures made from PEDOT:PSS – a conductive polymer commonly used in flexible and organic electronics that also swells and shrinks in response to humidity.
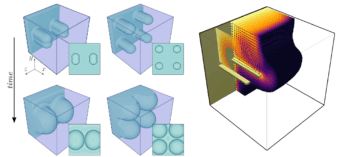
The researchers also study the responses of tessellated combinations of water bomb structures and the effect of shared folds on the energy barrier to snap between 0 and 1 states. They calculate a 33% increase or 15% decrease in the energy barrier for two joined water bomb structures for snapping between like and unlike states.
The researchers point out various limitations in the available operations, and the origami from 2D structures also limits the number of inputs. They also emphasise how this type of logic is unlikely to ever replace electronics, instead complementing existing electronics. The work is far from the first demonstration of mechanical robotics. As Treml et al. point out in the paper, “Mechanical logic devices have a long history, dating back to Leibniz’s step reckoner in 1672 and Babbage’s difference engine in 1822.” The crucial advance here is the ability to render logical operations in a mechanical system that is also soft.
Full details are reported in the Proceedings of the National Academy of Science.