The “bumblebee” bat – a little animal weighing just 2 g – has inspired researchers to make the first palm-sized drone that can efficiently navigate in confined, dark and cluttered environments. The drone, which works using echolocation and operates on a milliwatt of power, could find applications in search and rescue missions in difficult-to-access spaces, say the researchers at the Worcester Polytechnic Institute in the US who developed it.
The bumblebee bat thrives in deep, dark caves and can perceive objects as small as just 0.1 mm thanks to ultrasound-based echolocation. The bat sends short chirps and then listens to the echoes produced as the sound waves bounce off surfaces. This ability is all the more astounding since the animal has only simple biosensory apparatus and just two million neurons.
The new drone, developed by a team led by Nitin Sanket, differs from existing autonomous aerial robots that require sophisticated sensors to work – including light detection and ranging (LIDAR), radio detection and ranging (RADAR), tactile sensors and infrared-based depth cameras, to name just a few. These complicated devices cannot easily be deployed in cluttered environments under difficult environmental conditions, such as fog, dust, smoke, low light and/or snow. This makes them unsuitable for search and rescue missions in disaster zones, where such conditions are often the norm.
Another major problem with existing robots, explains Sanket, is that they generate a lot of propeller noise, making echolocation difficult. “It’s like trying to listen to your friend while a jet engine is taking off next to you,” he says.
The new device, which is detailed in Science Robotics, employs a physical acoustic shield inspired by the ear cartilages of bumblebee bats to overcome this problem. In addition, the team used an artificial-intelligence (AI)-based neural network denoising framework to recover weak echoes from noisy signals.
New device works well in the wild
Ultrasonic sensing is insensitive to most environmental conditions, such as smoke, snow, dust and darkness, that are visually degrading and render light-based sensors like cameras or LIDARs ineffective. As such, they work very well in the wild, says Sanket. “This will allow this new class of robots to be readily deployed for search and rescue in real-world settings where conditions are dynamic, unpredictable and visually degraded, bringing us one step closer to deploying swarms of aerial robots to look for survivors.”
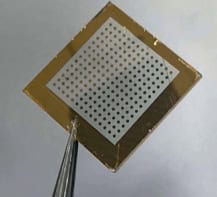
The researchers built their aerial device using standard off-the-shelf parts for motors, and flight- and electronic speed controllers. They custom designed a carbon fibre frame and 3D-printed other structural parts. The on-board computer is a Google Coral Mini development board and the ultrasound sensors are made by TDK Electronics and designed by team member Richard Przybyla. The robot measures around 16 cm across, costs roughly $400 and works using just 1.2 mW of sensing power.
The robot uses echolocation to determine obstacle locations in 3D using trilateration, explains Sanket. “This means that once it has found the obstacles, it plans a path around them to avoid them and go towards a goal direction (like North, for example).”
At the heart of the device is noise reduction using the physical shield and the neural network (dubbed “Saranga” by the team), which reduces noise by looking at echo signatures over time, in the same way as the bat’s neuronal signal processing system does. The researchers trained the network entirely in simulation and say that it can be adapted to the real world without re-training/fine-tuning.
Looking to nature’s experts
The idea for the project actually started out as a joke during Halloween of 2024, remembers Sanket, when he and his students wanted to build a robot that emerged from smoke for a video. “That film was much harder to make than we anticipated, and it turned into an obsession, forcing us to solve a real problem: how to make robots navigate in visually degraded/challenging conditions.”
“To find the answer, we looked to nature’s experts, bats, which not only live but thrive in damp, dark and dusty caves and can pinpoint something as thin as a human hair,” he explained.
In their experiments, Sanket and his colleagues had to study how bats deal with low signal-to-noise ratios. They found that bats change their cartilage stiffness to muffle noise and have peculiar nose-leaves (ridges on their nose) to modulate sound chirps. They based their physical acoustic shield on these structures.
WiFi loophole allows drones to see through walls, power law defines football defending

According to the researchers, these highly-functional autonomous tiny aerial robots could be deployed in critical humanitarian applications such as search and rescue, cave exploration and combating poaching – tasks currently infeasible using existing aerial robots. “They could, for example,” says Sanket, “be sent into disaster areas where human or larger helicopter access is limited, thereby alleviating the challenges and pressures associated with saving lives.”
Looking ahead, the Worcester Polytechnic Institute team is now working to increase the robot’s flying speed and reduce its size even further. “We speculate that looking at novel forms of flight mechanisms is the key,” Sanket tells Physics World.