
Far above the ocean’s surface, aircraft hunt for an unseen enemy below the waves. To mark the centenary of the Royal Air Force, tactical co-ordinator Jason Furlong and pilot John Ryder describe how they use physics to find submarines
At a Royal Air Force (RAF) base in northern Scotland, it has just turned 0200 GMT on a blizzardy winter morning. A bleary-eyed maritime patrol crew make final aircraft and mission system checks before air traffic control clears 1JF to line up on runway 08. As the plane positions itself for departure, a final brake check is conducted just as take-off clearance is issued. Auto-throttle is engaged and the two throttles advance to full power. The engines spool up with a howl, and the cold silence of the night is shattered as this hunter powers down the runway. At the call of “rotate”, the pilot pulls back on the controls propelling 1JF into a pitch-black moonless sky and en route to a long night over the north Atlantic. The hunt for submarines is on.

A very short underwater history
While submarines are now relatively commonplace in the world’s oceans, it has taken mankind thousands of years to get there. Underwater military operations can be traced back to the Peloponnesian War from 431 to 404 BC, which was fought between the Delian League led by Athens and the Peloponnesian League led by Sparta. Thucydides (a main source from that era) records the Athenians using “divers” – probably men just holding their breath – during the Siege of Syracuse in Sicily. The divers cleared stakes that had been driven into the harbour floor by the Syracusans to defend against and damage Athenian ships.
Skipping forward to the early 1500s, Leonardo Da Vinci made some sketches of potential underwater vehicles, and the first prototype submersible was designed in 1578. However, it took another 42 years for the first successful submarine to be built. It was made by Cornelius Jacobszoon Drebbel, a Dutch engineer in the service of King James I of England. Propelled by oars and supplied with air from floating tubes, it was a simple vehicle and probably was not able to travel much below the surface.

One of the next major advances occurred in 1775 when the Turtle – among the first military submarines to be constructed – was built by the US. Its purpose was to attack British warships by attaching explosives to the enemy hulls. Although it looked more like an acorn than any well-evolved sea creature, its design pioneered underwater propulsion by using hand-screws to turn a propeller.
As technology advanced and various engineering challenges were solved, submarine propulsion and power evolved from human to mechanical, electrical, diesel and nuclear. Some modern vessels even power themselves with radical technologies that don’t rely on nuclear motors or access to atmospheric oxygen either. Indeed, the ability to remain submerged without surfacing for air is a critical advantage so the submarine can avoid poking bits of the vessel above the water’s surface, which could lead to a “detection opportunity” for a hunter’s sensors.
The first submarines were designed to sink surface ships, but today’s military vessels have many different roles: they can carry and launch cruise or ballistic nuclear-tipped missiles to hit far away land targets (deterrence and/or attack), deploy special forces for midnight raids, conduct surveillance, or simply deter an enemy by their assumed presence in a critical sea lane.
Many world powers possess and invest in an undersea military capability including the UK, US, Russia, China and North Korea, while the technology has also been exploited to a lesser extent by drug cartels, the tourist industry, adventurers and even the Beatles. Consequently, the cat-and-mouse game you might recall from Hollywood movies such as The Hunt for Red October is alive and well, with surface warships, aircraft and other submarines all used to detect and deter these (almost) silent vessels.
Submarine spotting in the First World War

In response to the big threat posed by enemy submarines in the First World War, which saw more than 5000 ships destroyed and 15,000 sailors lose their lives, the British Board of Invention and Research (BIR) came up with multiple counter-strategies. Working “to initiate, investigate and advise generally upon proposals in respect to the application of science and engineering to naval warfare”, the BIR included top physicists such as William Bragg and Ernest Rutherford. Switching his focus during the war from radioactivity and atomic structure to underwater acoustics, Rutherford made significant contributions to improving the underwater detection of sound from submarines.
There were, however, some rather odd solutions too for detecting submarines. One of the more unusual ideas proposed by the BIR involved dragging a dummy periscope behind a ship while food was discharged nearby. The aim was to attract a flock of seagulls to the periscope and, following repeated runs, condition the birds to associate periscopes with a good meal. Ergo, anytime a periscope popped above the surface, a flock of seagulls would beeline towards it giving the game away. Sadly, this idea didn’t work and the seagulls were left in peace to harass small children with ice creams.
Enter the maritime patrol aircraft
As with all new military technologies, the construction of submarines soon led to the development of techniques to spot enemy vessels. Some of these, dreamt up during the First World War, were rather odd (see box, above). That conflict also saw the introduction of aerial anti-submarine warfare (ASW) patrols. Blimps and early land-based planes became the first marine patrol aircraft (MPAs) and, by the Second World War, converted bombers and airliners were used in addition to purpose-built aircraft. Since then, most MPAs have derived from civilian airliners as they can fly long distances, stay airborne for a long time and have lots of interior space for the crew and mission equipment.
Two early examples of converted-airliner MPAs were the RAF’s Nimrod (originally the de Havilland Comet), which was retired in 2010, and the US Navy’s still-active P-3 (originally the Lockheed Electra). The most recently developed MPA, the Boeing P-8A Poseidon, is based on the Boeing 737, and is set to enter service with the RAF in the near future. Related to the MPA is the shipborne maritime ASW helicopter. It cannot fly as far or for as long as the planes but operates closer to the threat as the landing pad is at sea – something that keeps the crew highly motivated to hunt submarines so their own base doesn’t get sunk.
Submarine search science
All these aircraft are designed to exploit the fact that submarines can be found using physics. During an ASW mission, an aircraft crew use an array of hi-tech sensors to find any tell-tale trace left by a submarine as it glides under the water. Broadly speaking, these sensors can be classified as acoustic or electromagnetic, and active or passive.
Acoustic sensors look for sound pressure waves under the water, while electromagnetic sensors identify various parts of the electromagnetic spectrum. As for active sensors, they emit a shaped pulse of energy, or a ping, and collect any returning signal that has reflected off part of the submarine. Passive sensors, meanwhile “listen” to and collect any noise in the environment, which hopefully includes an emission from the target.
Perhaps the most familiar sensor is radar (which stands for radio detection and ranging). Radars send out a pulse of a radio frequency and then wait for a return pulse as it bounces off a target. Knowing the speed of light and the time it takes to get a return, you can calculate the distance to the target. This active method has been around since the late 1930s and while its original purpose was military, it is now used in a wide variety of commercial applications including weather tracking and crop surveillance.
The two most common passive sensors for the electromagnetic spectrum are electronic support measures (ESM) and optical devices. Optical sensors are possibly the oldest method of detecting submarines, dating back to the venerable but still useful, “Mk 1 eyeball” – the military nickname for the human eye. Modern variants are sophisticated electro-optical digital devices that extend beyond the visual spectrum and into the infrared, and include a high-power zoom function to see at extended ranges. Meanwhile, ESM listens to a broad range of radio frequencies, hoping to pick up the submarine’s emissions, such as its radar.
Both of these sensor types can, however, only be used when the submarine is at the surface or lies at “periscope-depth” – the depth at which their periscope and mast-mounted sensors can break the surface. Given that this is when a submarine is at its most vulnerable, it’s not surprising that submarine commanders prefer to keep their vessels fully underwater, leaving only the acoustic domain as the main detection medium for an MPA crew to exploit during their hunt.
There is, however, one exception – the magnetic anomaly detector (MAD). This is an extremely sensitive magnet usually housed in a pod at the back of an aircraft to isolate it from electromagnetic noise generated by the aircraft. This sensor measures the Earth’s magnetic field and senses any anomalies, alerting the crew to the potential presence of a submarine (or other large metal object) under the water.
Sounds like trouble
One of the issues with using underwater acoustics as a submarine detection device is that it is unfeasible to get an aircraft down into the water to listen and ping for the submarine. This is why the disposable sonobuoy was developed during the Second World War. Sonobuoys are cylindrical canisters dropped by parachute from an aircraft. They contain a hydrophone (special microphone) tuned to the water and a radio transceiver to send the information back to the aircraft. When it hits the water, the sonobuoy immediately deploys the hydrophone to a preset depth and erects a small floating antenna for a simple on-board radio to transmit the signal back to the aircraft. The range of sonobuoys and where they should be placed depends on the target and the local environment and is one of the most highly classified areas in ASW operations.
Sonobuoys come in two basic varieties: active and passive. The passive sonobuoy is a fairly simple, inexpensive hydrophone; its sole job is to gather all the acoustic energy in the water and convert it to a radio signal, which is transmitted back to a computer processor on the aircraft. The active sonobuoy (sonar), on the other hand, works like an underwater radar, but instead of radio waves, it transmits high-frequency sound waves (the pings) that can be remotely controlled by the crew. Any wave that leaves the sonobuoy and hits a solid surface in the water reflects back towards the transmitter, where a hydrophone collects the acoustic energy and transmits it back to the aircraft via its radio. Once received on the aircraft, the passive and active signals are digitally processed and converted into a visual format for the crew to analyse. This allows them to establish whether they’ve found an acoustic contact of interest and, more importantly, determine if it is a submarine. The crew can then calculate its course and speed using a variety of techniques including Doppler analysis.
There are several difficulties with finding submarines using sound. The biggest of these is other sources of sound in the water. The oceans are a noisy place and they are getting noisier all the time. Everything from ships to oil rigs creates noise but there are also geophysical movements and marine animals that inject their signals into the water.
Another problem is that underwater sound doesn’t travel in a straight line. Much like light refracting through lenses, sound waves are subject to Snell’s law of refraction and bend in fluid because of changes to the speed of sound in the propagation medium. In the case of the ocean, the principal factors affecting the speed of sound in water are: temperature, depth, salinity and amount of suspended particulate.
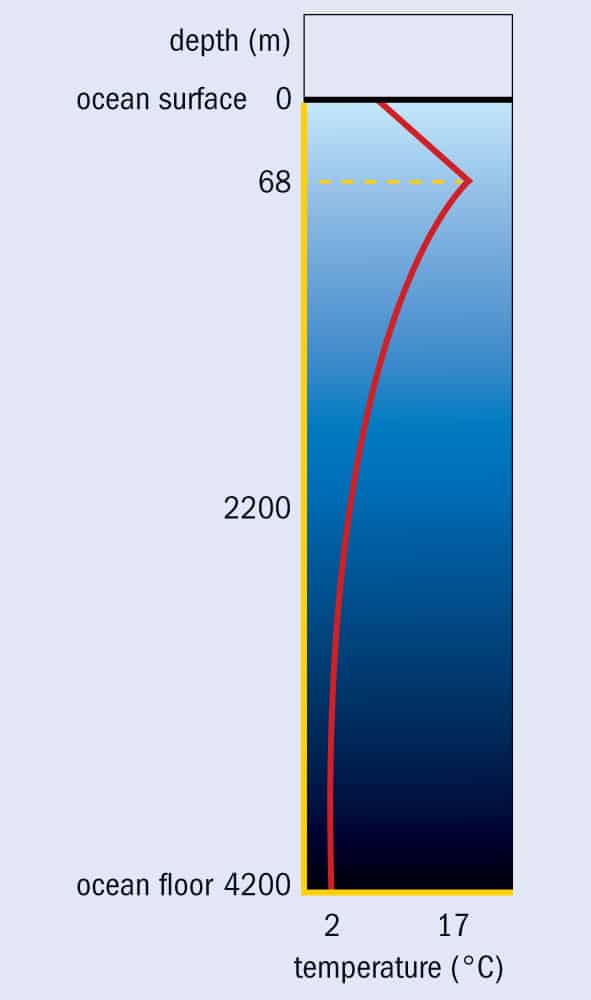
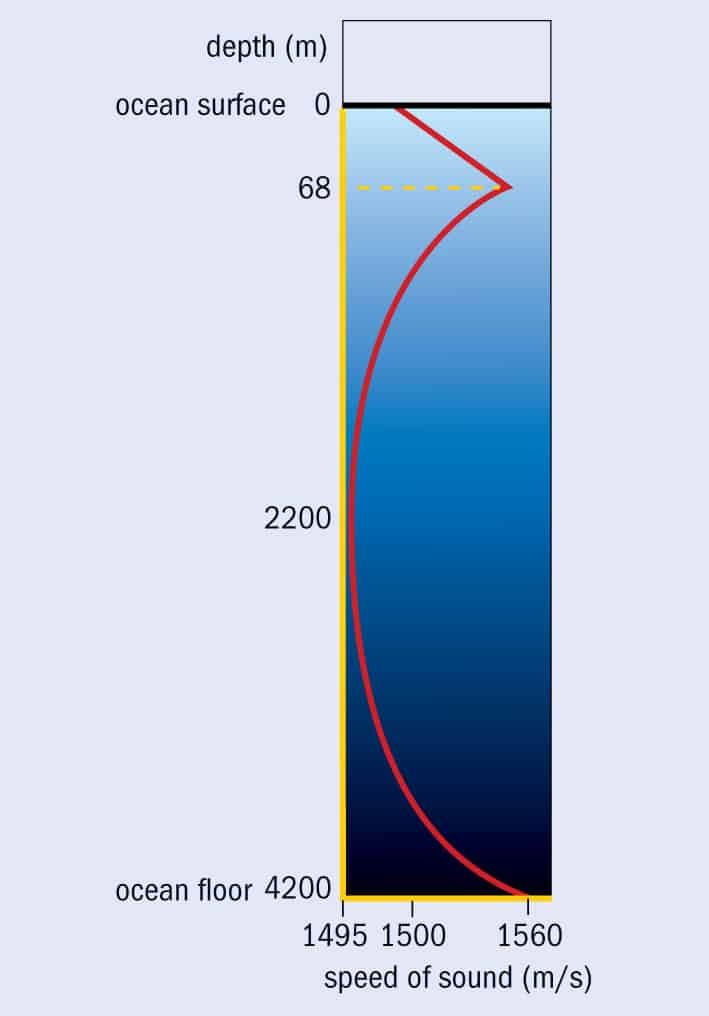
In the first 900 m of the ocean, temperature is the most important factor in determining the speed of sound (figure 1), while below that depth, the dominant factor is how far you are below the surface (figure 2). A sub hunter can measure or calculate most of these and as a result, vertical and horizontal profiles of the sound speed can be determined.
The most common way to measure the vertical speed component is to drop a disposable bathythermograph (a temperature and depth sensor) sonobuoy into the water, which gives a temperature profile similar to that in figure 1. If you know the temperature as a function of depth, you can now fairly accurately calculate the sound speed.
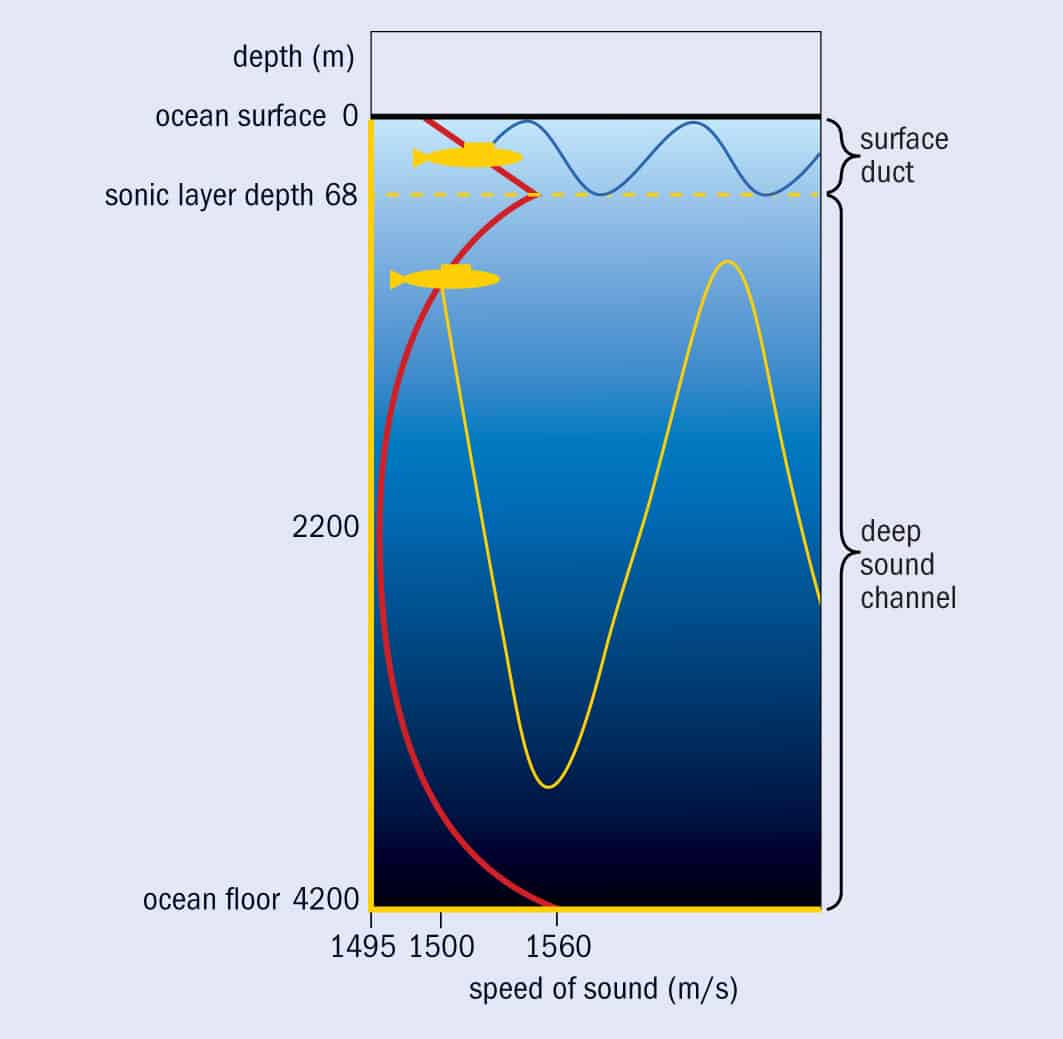
In the arbitrary example of figure 1, you will notice that from the surface to about 68 m, the temperature of the water increases before it suddenly decreases; this inflection in the graph is called the sonic layer depth (SLD) and is typical of a North Atlantic water mass early in the morning. The residual heat from the previous day is still latent in the lower levels of the SLD, but the higher levels have cooled off overnight. The consequence is that the speed of sound increases with depth in this shallow region as shown in figure 2, resulting in what is called a “surface duct” (figure 3). Sound waves from here heading towards the bottom of the ocean will be refracted back up to the surface. As for sound waves heading from this region towards the surface, they will bounce off the air–water interface and then refract off the lower layer much like light in a fibre-optic channel. Any sound source emanating in this region will therefore get trapped. Both active and passive sonobuoys in the surface duct will detect noise at extended ranges; however, all moving surface vessels inject noise into this duct, making it a very noisy region, allowing a submarine to blend into the background.
Below the SLD, as mentioned, the ocean water cools with depth, until the temperature eventually levels out. From this point the sound speed then increases dramatically due to the effects of water pressure. This increase creates a different, deeper sound duct. Known as the deep sound channel (DSC), it exists all over the world. Lacking all the noise of the surface duct, it tends to be quieter and, because it is physically larger, it favours lower frequencies, which attenuate less as a function of distance. These two types of propagation paths (surface and deep) are jointly referred to as direct-path propagation.
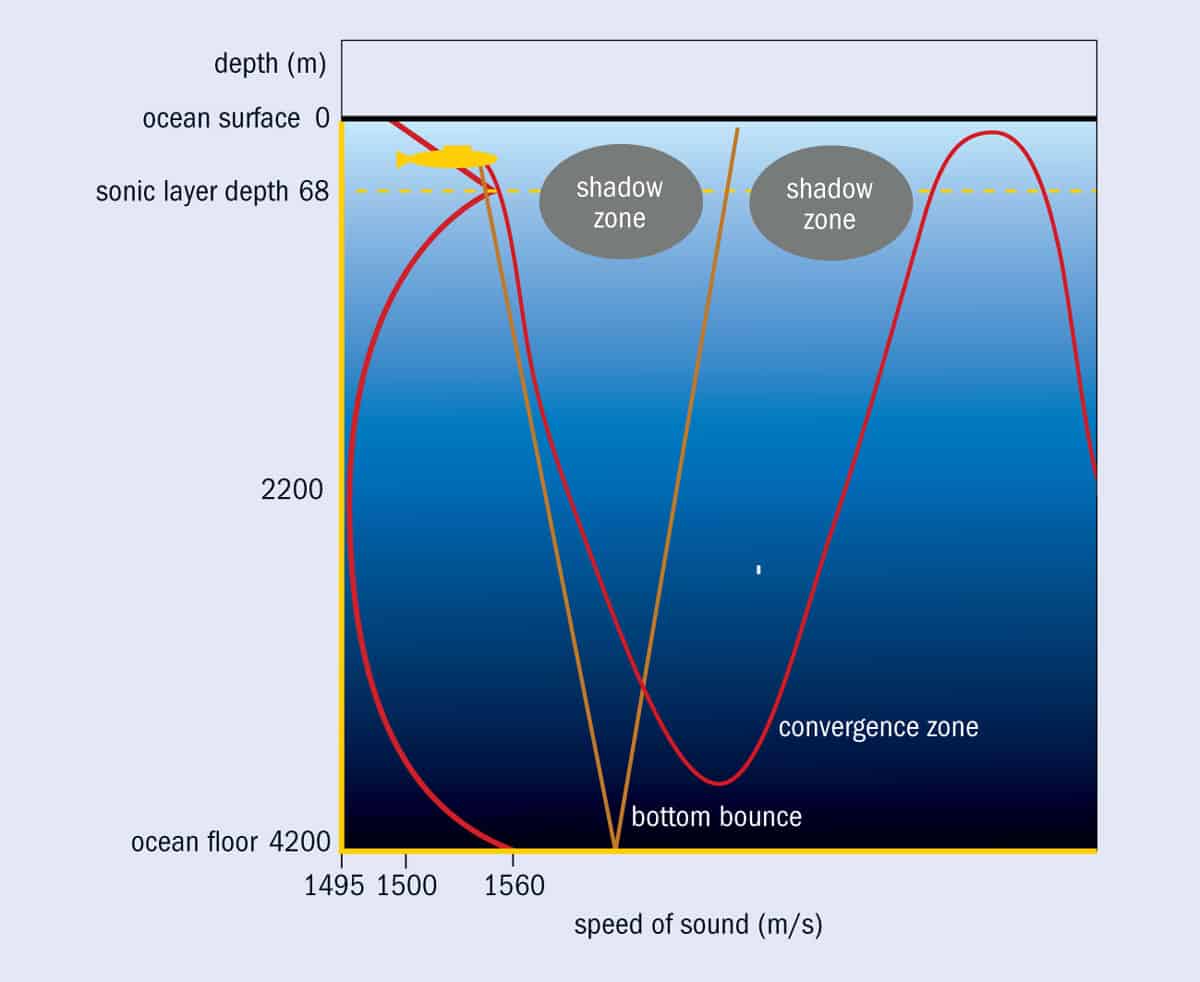
Two other types of sound propagation that bear mentioning are bottom bounce and convergence zone (CZ). Bottom bounce occurs when the sound waves reflect off the ocean floor and return back to a receiver. These are the most downward-oriented rays of sound that emanate from the source, overcoming the refracting effects of the layers to strike the ocean bottom and reflect back up to the receiver.
CZ occurs in very deep water, where there is space between the ocean floor and the bottom of the sound channel. High-volume sounds emanating from the near-surface area, like bottom bounce, penetrate the layers and then return back to the surface at a distance of 40–50 km away from the source. Because the sound waves are travelling at extreme depths, there is a blank region where there is no signal. This forms a doughnut-shaped annulus around the submarine making it vulnerable to detection in a specific area, but also creating areas called shadow zones where the submarine can hide. Plotting these other types of propagation paths on a diagram for a typical submarine, you get something that looks like figure 4.
Mission planning
Given all these factors, an MPA crew will spend a lot of time calculating the optimal placement of the sonobuoys and their depth settings before taking to the air. A variety of mathematical models have been developed that take into consideration all these factors so the crews can maximize their detection chances. Satellite images, weather buoys and underwater topographical charts all contribute to building an environmental picture so the crew has an idea of how to best configure the sensors. If the surface duct is weak, will the submarine hide in the noisy shallows or will it descend below the layer to hide? What is the time of day of the search? If it is late afternoon, then diurnal heating will increase the surface temperature and the water immediately below, erasing the effect of the surface duct so only the DSC exists. All these factors need to be taken into consideration by the crew. Of course, the submarine’s mission needs to be factored into the planning as the submarine captain will use tactics that best exploit the observed conditions to achieve mission success.
Now, this is just how sound works in the deep ocean. Once you get closer to shore, sea-bottom topography plays a larger part in the propagation of sound, adding to the already formidable list of factors that make it difficult to find an underwater target.
Springing the trap
Back in the North Atlantic and five hours into the patrol, the bleary-eyed crew of 1JF wait for the curry in the oven to heat up, while staring at their screens looking for a faint whisper to indicate the presence of their prey. Suddenly, the acoustic sensor operator cries out “Contact!” over the intercom, jolting the crew into action. The tactical co-ordinator sends a new waypoint to the pilot; the plane banks and the chase is on. With careful co-ordination between pilots and tactical crew, sonobuoys are surgically deployed to capitalize on the weak signal and soon the presence of the submarine is confirmed as it is trapped in a carefully laid pattern of submerged “trip-wires”. Now the crew must maintain acoustic contact until it can be handed over to another aircraft, helicopter, ship or possibly even a friendly submarine. Of course, in wartime, the crew will be waiting for another call over the radio; one that authorizes an attack.
- For more about the 100th anniversary of the RAF, visit www.raf.mod.uk/raf100



